6D Pose Estimation for Subsea Intervention in Turbid Waters (Electronics)
Abstract
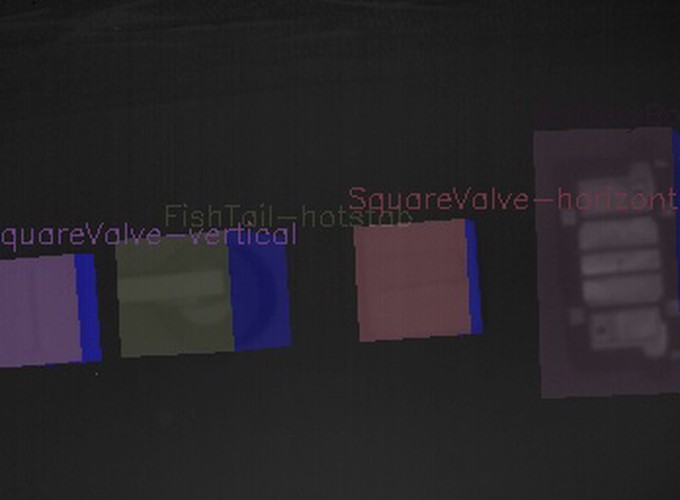
Manipulation tasks on subsea instalments require extremely precise detection and localization of objects of interest. This problem is referred to as “pose estimation”. In this work, we present a framework for detecting and predicting 6DoF pose for relevant objects (fish-tail, gauges, and valves) on a subsea panel under varying water turbidity. A deep learning model that takes 3D vision data as an input is developed, providing a more robust 6D pose estimate. Compared to the 2D vision deep learning model, the proposed method reduces rotation and translation prediction error by (−Δ0.39∘) and translation (−Δ6.5 mm), respectively, in high turbid waters. The proposed approach is able to provide object detection as well as 6D pose estimation with an average precision of 91%. The 6D pose estimation results show 2.59∘ and 6.49 cm total average deviation in rotation and translation as compared to the ground truth data on varying unseen turbidity levels. Furthermore, our approach runs at over 16 frames per second and does not require pose refinement steps. Finally, to facilitate the training of such model we also collected and automatically annotated a new underwater 6D pose estimation dataset spanning seven levels of turbidity.
Ahmed Mohammed
My research interests include medical imaging, computer vision, machine learning.